
Home page
This is the home page where you will find key settings and information. The page includes the following sections.
Restart on-board computer.Bluetooth connection
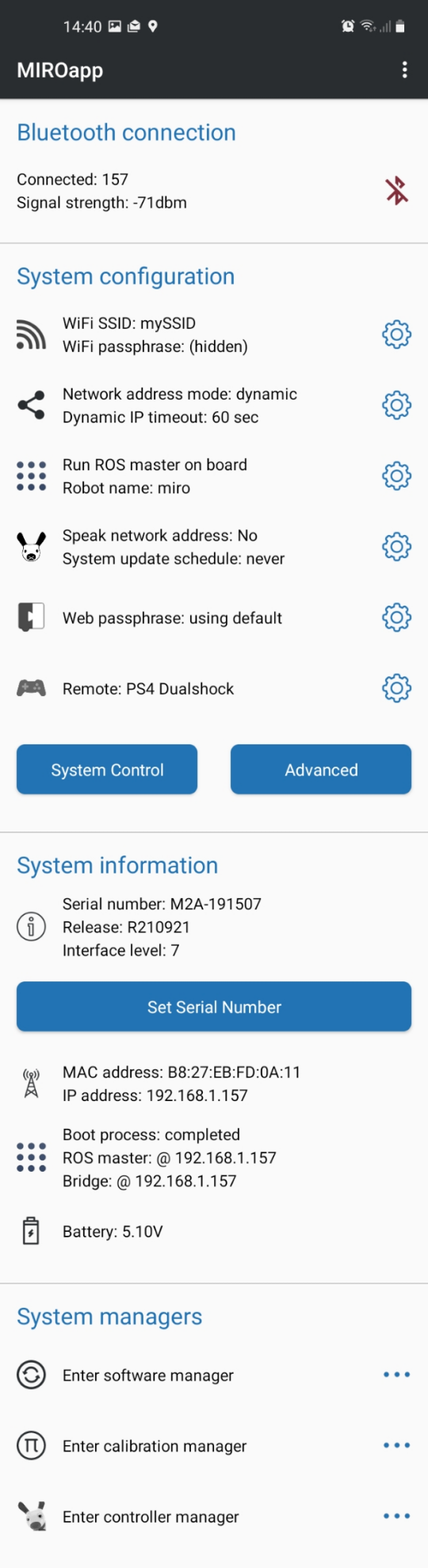
At the top of the page is the Bluetooth connection status. Click on the connection end symbol to disconnect from the robot and return to the Scan page (or click your device's Back button).
System configuration
Network credentials

Click the blue settings icon to provide or update the credentials for your local wifi network. When you reboot, the robot will use these to connect to the wifi.
Network settings

These settings determine how your robot discovers its own network address. See the page Network settings dialog for details.
ROS settings
This is the configuration of your ROS network. If you need help with these settings, see the page ROS settings dialog.
Supplementary settings
These settings affect supplementary systems. Check Speak network address to hear the assigned network address read back to you at boot time. For more information on how to set System update schedule, see the Software manager.
MiRocode settings

These settings are for using your MiRo with the MiRocode environment. You should set the web passphrase (any words separated by spaces) and enter the same web passphrase into the box in MiRocode.
Remote settings

This section provides for pairing a (PS4 Dualshock) controller to your robot. Once paired, the controller can be used as a remote control. See the page Remote settings dialog for details.
System information
Identification and software

If you have Set Serial Number, it will be displayed here. This is for your own identification purposes only, the robot ignores this setting.
You can also see the currently installed software release—enter the Software manager to see more detail on this.
Network information

This section shows the MAC address of the wifi interface on the robot, as well as the IP address that is currently assigned to that interface. This will change if the robot reconnects to or disconnects from the network.
ROS information
This section indicates the status of the boot process (usually 'completed'), as well as the network address at which the ROS master (if running) and the system bridge were started on. These values should match the value at 'IP address' in the section above, if the ROS master is configured to run on-board.
Physical status

Here you can read back the status of the battery. Anything above 4.9V is fresh, anything below 4.7V and it's time to recharge. Most of the time you'll see a value in the 4.7-4.9V range. If the voltage reaches 4.6V, you'll start to hear the low battery alarm.
System managers
Click on one of the blue ellipsis symbols to enter that system manager. In each case, a dedicated page will open in MiRoapp.
- Use the Software manager to bring your robot's software up-to-date.
- Use the Calibration manager to check or adjust the calibration of your robot's movements.
- Use the Controller manager to start one of the provided on-board controllers (usually, demo mode).
