
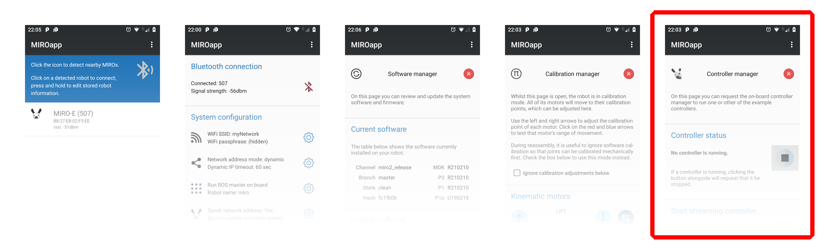
Controller manager

To return to the Home page, click the red exit symbol.
Controller status
This section indicates what the on-board controller manager is currently doing, and will update automatically as you send requests.
Stop controller
Click the stop button to stop the running controller, if there is one.
Start ... controller
Press any of the "start" buttons to start one of the test controllers running. A short description of each is given on the page in MiRoapp.
- Start the streaming controller to stream a piece of test music to the robot (from on board the robot). The music will start to play after a few seconds.
- Start the Remote controller to put the robot into remote control mode. If a controller is paired and turned on, you will be able to control the robot with this controller.
- Start the Demo controller to put the robot into demo mode. The options for this controller are described below.
The robot may move, and you should prepare for this—in particular, make sure it is not able to fall!
Demo controller options
See separate page Demo options.
